
There are many misconceptions surrounding quadcopters and multirotors. The single main reason that they are popular for small UAS is mechanical simplicity. It’s worth pointing out that a quadcopter is LESS stable than an equivalent regular helicopter (and I’ll explain why in a sec), and is also LESS efficient than an equivalent regular helicopter.
I will cover the advantage of more mechanical simplicity and the disadvantages of lower efficiency and stability of quadcopters versus conventional helicopters.
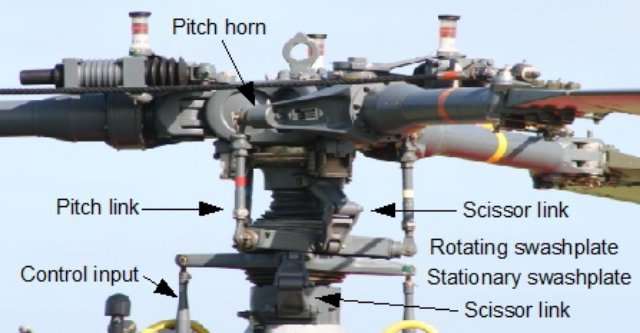
Let’s talk about mechanical simplicity. On a helicopter, the main rotor blades must adjust their pitch as they spin around, in order to vector its thrust. Combined with a tail rotor (or in some designs, using a combination of co-axial or tandem propellers such as the Chinook), the helicopter is able to manoeuvre. The cyclic-pitch mechanism that allows a helicopter to do this is complex (and therefore expensive).
A quadcopter however, uses four motors connected to four fixed-pitch props. They are literally propellers attached directly to motors, a sum total of a single moving part for each of the four props. This makes them extremely simple (and therefore low cost), and thanks to advances in high power-density electric motors and power semiconductors, also very easy to control.
HOWEVER, when you scale things up, it starts to make more sense from a cost and complexity point of view to have a single relatively complex mechanism than have four (or more) separate simple mechanisms. Particularly when you factor in the other disadvantages.
So one disadvantage is stability. Quadcopters are not more stable than regular helicopters, they are less stable. In fact, they’re so unstable, they need to be fitted with electronic stabilization because no human can realistically fly one without it. (I design such stabilization systems and autopilots for small multirotors). The fact that quadcopters mandatorily need full electronic stabilization, while many RC helicopters do not, leads to the misconception that quadcopters are more stable. If you were to fit an equivalently sized helicopter with the same full electronic stabilization system, you’d quickly find that a helicopter is in fact more stable.
Want to see what happens when you mess with the electronic stabilization? This video was shot during development of our own quadcopter some time ago, during the video,you can see the quadcopter gradually become more stable in the air as I tune the parameters. In the last half of the video, I deliberately detune the controller by setting one of the twelve tuning parameters to zero (twelve because of PID and DD gain on three axis) just to demonstrate what would happen (and for fun).
Why? It comes back to that mechanical simplicity. In order for a quadcopter to remain stable in the air, it must individually adjust the thrust produced by each of its props. If the props on one side are producing more thrust than the other, the quadcopter tilts to one side. With fixed-pitch propellers, the only way for it do adjust the thrust is to speed up or slow down the prop.
HOWEVER, because a quadcopter has to use its motors to speed up or slow down a prop, there is a built-in delay time to how fast a quadcopter can react because it takes time to change the speed of the prop due to inertia. The bigger the prop, the more energy it takes to change its speed, so either you need to drastically oversize each motor (which would increase the weight and cost significantly), or have slow dynamic response. Helicopters on the other hand, with variable-pitch blades, can simply change the blade pitch to change thrust, and that requires much less energy to do so. (Side note: variable-pitch quadcopters would also be able to do this, and are awesome, but kind of defeats their mechanical simplicity benefits). Slower dynamic response means less stable. Also worth mentioning that a single large rotating blade on a helicopter also provides more gyroscopic stability than quadcopters.
So this brings us onto the second disadvantage: Efficiency. One of the other answers mentions that the tail-rotor of a conventional helicopter does not contribute to lift and is therefore a point of inefficiency. On a quadcopter, there isn’t this point of inefficiency, but having to continuously slow down and speed up the props to remain in the air does waste a lot of energy (however regenerative braking would reduce this wastage, but not many models do this at the moment). What’s interesting is that the effect of this was very evident when we were tuning our quadcopter – our quadcopters were designed to lift about 1kg of payload, but they could be made to lift a brick (about 2.3-2.6kg) ONLY if the stabilization tunings were relaxed so that the craft was less stable in the air, but wasted less energy trying to stay absolutely level. Either way, aerodynamically, larger and slower spinning props are more efficient than small fast-spinning props.
This comes down to a lot of aerodynamics, but in effect it’s to do with the fact that the formula for kinetic energy is 1/2mv^2: it takes four times more energy to move a mass of air at twice the speed; compared to only twice the amount of energy to move twice the mass of air. In both cases, the same amount of momentum is conferred (m*v). So it turns out that it takes less energy to exchange momentum with a large amount of air at slow speed than it is to exchange momentum with a small amount of air at high speed. Therefore a large, slower-moving prop is more efficient than a small large-moving prop, especially at hover.
So there you have it: quadcopters are mechanically simpler (therefore potentially cheaper), but not necessarily any more stable, and definitely less efficient than conventional helicopters. And because the mechanical simplicity becomes less of a benefit as you increase the size, while the inefficiency becomes more of a hindrance, they do not scale well, and are not used for large-scale transport (and probably will never be used for large-scale transport).
It’s no surprise then that one of the most popular drones in Japan (where unsurprisingly drones have been in use for some time now) is the Yamaha RMAX, a conventional helicopter type UAS, used for crop dusting.

Nevertheless, the benefits of mechanical simplicity isn’t to be underestimated, simplicity (usually) means lower costs and better robustness. What makes quadcopters so popular is is the fact that because of this simplicity, you don’t have to worry about mechanical design at all, you can duct-tape four motors to some sticks and let the electronic stabilization take care of correcting flight dynamics of an appalling mechanical design. Don’t believe me? This is precisely what we did. This quad was made literally in minutes by duct-taping three sticks together along with the rest of the electronics:
Perhaps one other small benefit of a quadcopter in terms of operation, is that it’s slightly safer due to having smaller blades (which are less lethal when hitting something, or falling off mid-air). And therefore they’re operationally a bit more convenient to deploy. But I really doubt that there is any serious research going on involving long-distance delivery and quadcopters.
Source: Forbes
Thanks for this article, gave me some perspective on design considerations etc. As a layman with deep interest in such development, could I ask if it is not impossible to design a hybrid UAS embodying the technological advantages of both quad and helo design?
Perhaps a conventional helicopter body incorporating control surfaces and functional systems. On this would be mounted a quad-rotor drive, with rotors mounted at optimal (i.e., not necessarily in the same plane) points for aerodynamic efficiency.
Regards from NZ
Mani
Very good article.