
A team of researchers at the Ira A. Fulton College of Engineering and Technology, Brigham Young University have just published a paper that addresses the deficiencies in data collected by UAV missions flown using manual pilot control. These are heavily dependent on the skill and judgment of the operator or the weather conditions that make precision flying more difficult.This can often lead to gaps between the collected images or areas where insufficient images are captured for 3D reconstruction.
Abstract
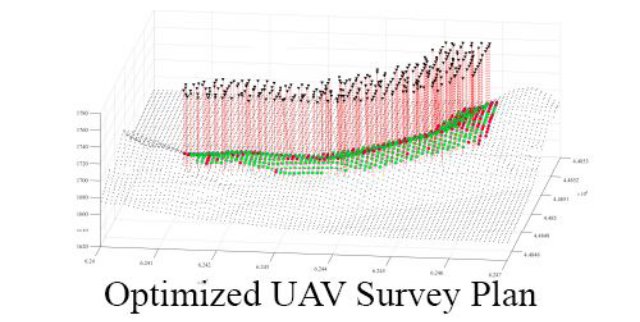
This work demonstrates the use of genetic algorithms in optimized view planning for 3D reconstruction applications using small unmanned aerial vehicles (UAVs). The quality of UAV site models is currently highly dependent on manual pilot operations or grid-based automation solutions. When applied to 3D structures, these approaches can result in gaps in the total coverage or inconsistency in final model resolution.
Genetic algorithms can effectively explore the search space to locate image positions that produce high quality models in terms of coverage and accuracy. A fitness function is defined, and optimization parameters are selected through semi-exhaustive search. A novel simulation environment for evaluating view plans is demonstrated using terrain generation software.
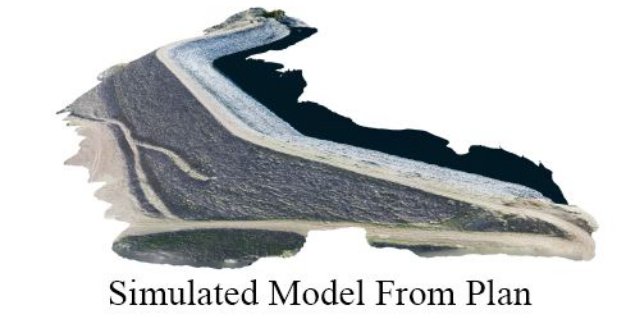
The view planning algorithm is tested in two separate simulation cases: a water drainage structure and a reservoir levee, as representative samples of infrastructure monitoring. The optimized flight plan is compared against three alternate flight plans in each case. The optimized view plan is found to yield terrain models with up to 43% greater accuracy than a standard grid flight pattern, while maintaining comparable coverage and completeness.
The full paper can be downloaded here.
Source: Remote Sensing