
To protect flying robots without hindering their flight, Imperial experts found answers in the ancient art of origami. Taking inspiration from the ancient art of paper folding, scientists at Imperial College London’s Aerial Robotics Lab have equipped drones with lightweight, impact-absorbent cushioning to protect them from bumps and scrapes.
Their research, published in Science Robotics, shows how drones equipped with the Rotary Origami Protective System (Rotorigami) incur less force and damage during a collision, and are thus able to keep flying after impact with obstacles.
Lead author Dr. Pooya Sareh, who led the research at Imperial’s Department of Aeronautics and now directs the Creative Design Engineering Lab at the University of Liverpool, said: “Using an origami-inspired protective layer, we have built a way to let miniature flying robots navigate in confined or cluttered spaces safely and efficiently.”
Folding under pressure?
Dr. Sareh and colleagues folded a thin, lightweight sheet of plastic into a descendant of the Miura-ori fold– a simple origami pattern particularly suitable for engineering applications.
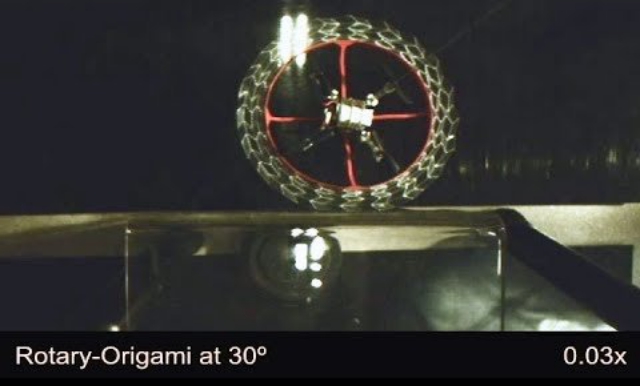
They built the protective structure around a rotating inner frame (pictured above). This one structure protected all the propellers at once from side-on collisions, and helped keep the vehicle in the air during and after impact.
The researchers tested and compared the effectiveness of Rotorigami-equipped drones with existing designs. They found that the protective structure helped reduce the force of an impact, and helped keep the drone from uncontrolled spinning after impact. keep the drone upright afterwards.
Dr. Sareh said: “We’ve successfully made a lightweight, impact-absorbing, rotating bumper for drones that makes them more resilient to crashes.”
Avoiding accidents
Although drones are equipped with obstacle detection and avoidance software, they often fail to avoid obstacles that are less easy to detect like windows and wires. The bumper equipment therefore protects the drone from any crashes that do happen.
Project Principal Investigator Dr. Mirko Kovac, Director of the Aerial Robotics Laboratory at Imperial in the Department of Aeronautics, said:
“Many insects, such as flies or bees, use a combination of impact-avoidance techniques and impact resilience. They largely rely on collision sense-and-avoid systems – but they also have protective structures in case a collision does occur. We applied this very concept to our work here.”
Dr. Kovac added:
“I believe that future aerial vehicles will combine the crash-avoidance technologies with new safety and impact-resilience hardware that uses new materials and structures.”
Next, the team will look at how to mitigate damage from the top and bottom of drones. Dr. Sareh said:
“We have addressed side-on collisions – now we must look at how to protect drones from above and below.”
Dr. Kovac added:
“This is a great example of a new generation of ‘soft aerial robots’ that can navigate obstacles safely and efficiently.”
In future, they want to use their origami bumper designs on larger drones that navigate rainforests, or ones with heavy loads like blood delivery for transfusions – though they note the use of fully autonomous drones in unsupervised operation is a long way off.
The work presented in this paper was funded by the UK Engineering and Physical Sciences Research Council (EPSRC)
“Rotorigami: A rotary origami protective system for robotic rotorcraft” by Pooya Sareh, Pisak Chermprayong, Marc Emmanuelli, Haris Nadeem and Mirko Kovac, published 26 Sep 2018 in Science Robotics.
Source: TechXplore