

has just released a new paper, “Encounter Aware Flight Planning in the Unmanned Airspace” available for download through the link below. This is, to our knowledge, the first ever quantitative analysis of flight planning in the context of these two UTM architectures.
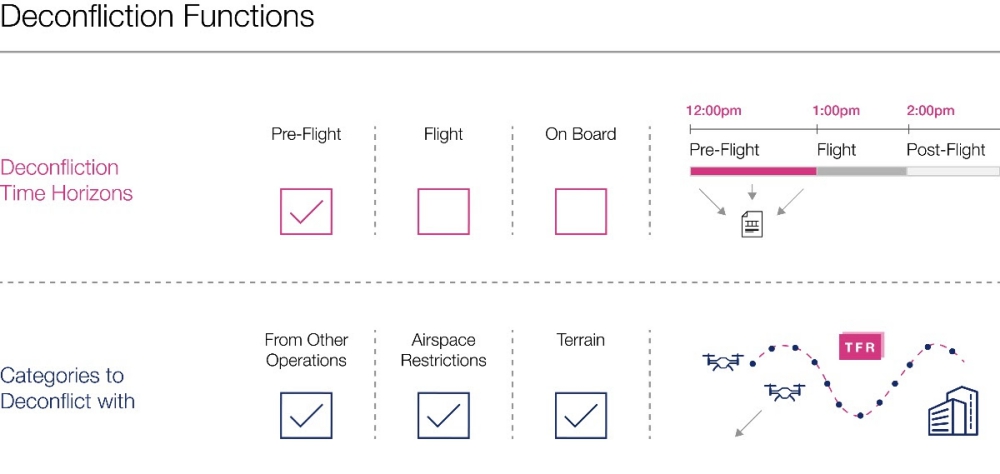
This work began as an exploration to understand the limits of strategic preflight deconfliction. Deconfliction is the process of generating flight plans that are collision-free and adhere to the separation standards defined within the airspace between vehicles, terrain, and restricted areas. In this work, we considered scheduling, geometric planning, and trajectory optimization as algorithms for deconfliction. We identified trajectory optimization as the most promising approach, and added three key modifications to it in order to scale the approach to large numbers of flights and to improve computational performance.
Ultimately, we derived new airspace density metrics, examined deconfliction in centralized and federated UTM architectures, and formulated a novel deconfliction algorithm that can perform at the highest levels of safety and efficiency. Some of the most interesting findings are below:
Traditional deconfliction algorithms are optimized for 1:1 encounters, and tend to perform poorly in the projected airspace densities of the future, when many operations will overlap.
For future airspaces, it is important to ensure that the number of vehicles per encounter remains low, even as the total occupancy of the airspace grows. The Encounter Aware algorithm is a great way to think about airspace design, keeping the number of vehicles in an encounter low to make the airspace easier to manage without reducing its capacity as a whole.
UTM architecture plays a key role in how effective deconfliction can be. The choice of federated or centralized UTM architectures can have a significant impact on how well separation can be maintained and how well the airspace can be utilized.
Download the full report here.
Source: Press Release