

One of the main challenges that eVTOL systems are facing is to ensure the reliability of the operation at the time that a reasonable cost per vehicle is kept. Embention has brought its wide experience working in the UAV market to deliver the Veronte Autopilot 4x for eVTOL, a redundant flight controller ready for eVTOL certification.
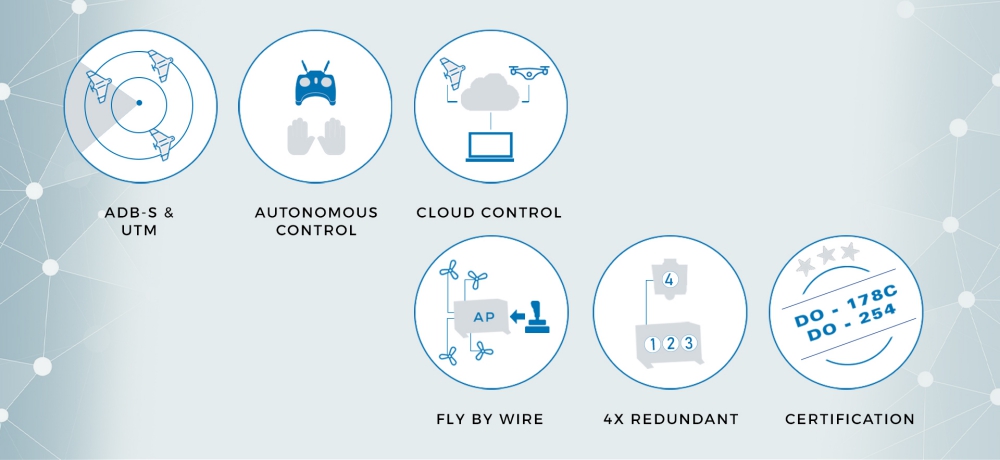
The Veronte Autopilot 4x embeds three redundant autopilot cores, being possible to connect an external 4th autopilot core for advanced configurations. All this, managed by a dissimilar arbiter microprocessor running voting algorithms for selecting the autopilot core in charge of the eVTOL control at any time. One of the key factors in Veronte Autopilot 4x is that it has been designed in the way that there is no single point of failure. Even in the event of an arbiter failure, the autopilot will remain operative for eVTOL control.
Quality Assurance from Design to Manufacturing
Besides the redundancy, another critical eVTOL safety aspect is the autopilot certification. Veronte Autopilot 4x has been designed according to the DO178C and DO245 aircraft standards for onboard software and hardware design with DAL B compliance level. It provides a certification datapack including autopilot reliability evidence needed for passing an eVTOL certification process.
Manufacturing quality assurance is also a must when we talk about safety. Embention has set up a set of procedures for ensuring the reliability in the production process. The Environmental Stress Screening (ESS) processes subject to all produced autopilot units to vibrations and temperature stress in order to force the early failure of defective units. This process ensures the extended lifetime of the autopilot for eVTOL.
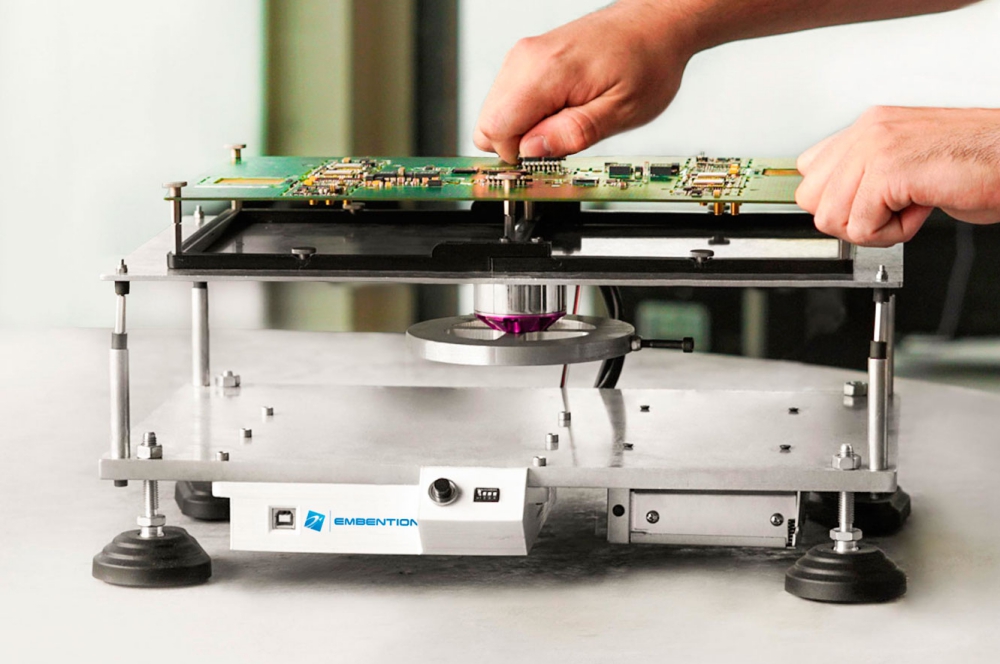
Environmental Stress Screening
The flexibility given by the Veronte Autopilot 4x provides the aircraft integrator with tools for adapting autopilot performance to the needs of all kinds of eVTOL vehicles (multirotor, tilting rotors, tilting wings, autogyro, hybrids…) without requiring to modify the source code. At the same time, Veronte Autopilot 4x can be configured for including custom control modes, such as fully autonomous flight control or fly-by-wire mode.
Once all safety aspects for massive eVTOL integration within the controlled airspace occurs, we will get used to seeing eVTOL flying over our heads. These aircraft will be connected to the LTE network for sharing information and getting weather and traffic data. For this, Veronte Autopilot 4x includes a 4G communications module and Embention is already exploring 5G options. This, together with the ADS-B IN & OUT module embedded in the Veronte Autopilot 4x makes it ready for ATC / UTM integration of eVTOL.

The flexibility given by the Veronte Autopilot 4x provides the aircraft integrator with tools for adapting autopilot performance to the needs of all kinds of eVTOL vehicles (multirotor, tilting rotors, tilting wings, autogyro, hybrids…) without requiring to modify the source code. At the same time, Veronte Autopilot 4x can be configured for including custom control modes, such as fully autonomous flight control or fly-by-wire mode.
Once all safety aspects for massive eVTOL integration within the controlled airspace occurs, we will get used to seeing eVTOL flying over our heads. These aircrafts will be connected to the LTE network for sharing information and getting weather and traffic data. For this, Veronte Autopilot 4x includes a 4G communications module and Embention is already exploring 5G options. This, together with the ADS-B IN & OUT module embedded in the Veronte Autopilot 4x makes it ready for ATC / UTM integration of eVTOL.
Source: Press Release