
Colorado State University
A team of engineers at Colorado State University have designed a ‘gripper’ mechanism that allows MAVs to ‘perch’, rather than hover, in order to economise battery power.
Micro aerial vehicles (MAV) with multiple rotors, or multicopters, have many promising applications ranging from environmental monitoring, agricultural inspection, to package delivery. These applications, however, usually face a critical problem: the flight time of MAVs is limited due to the low aerodynamic efficiency and high energy consumption.
One promising solution is to make them rest on desired objects using perching, an important capability in biological flyers (e.g., birds). To enable robust perching, traditional methods generally rely on computational intelligence (i.e., precise motion control) so that a flying robot can gradually decrease its speed to perch onto an object. Recent studies reveal that robust perching for biological flyers uses not only computational intelligence but also mechanical intelligence: their feet can passively damp out landing impact even if their motion is not precisely controlled.
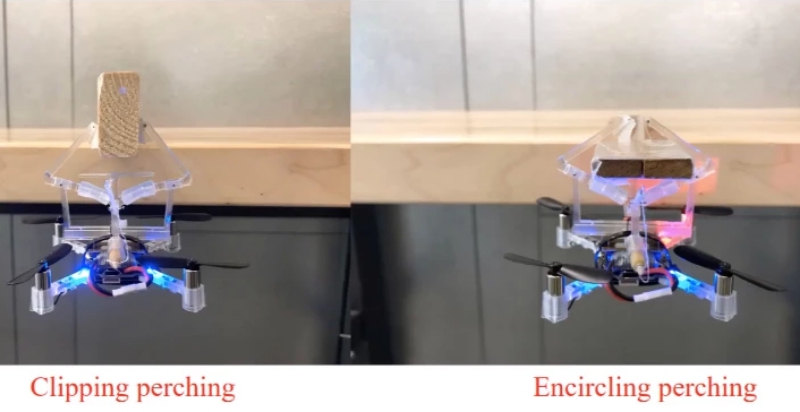
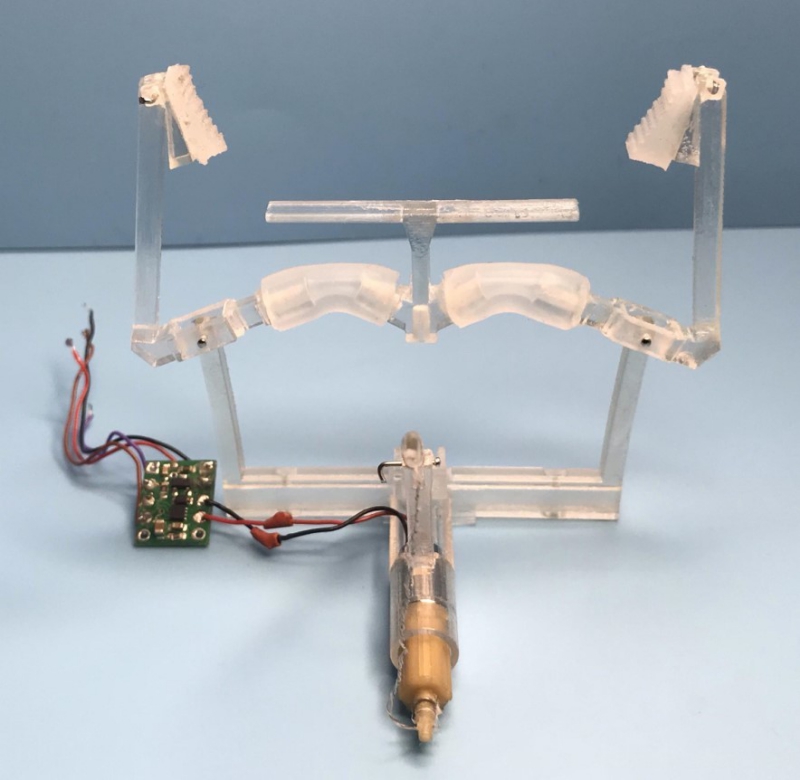
Inspired by recent biological investigations, the researchers developed a novel perching gripper exhibiting mechanical intelligence that allows passively perching without accurate control of the contact speed, thereby reducing the requirement for computational intelligence. The gripper has two unique characteristics. First, it has two stable states (open and close) and can passively switch from open to closed state using the impact between the gripper and the perching object. Second, the gripper has two perching methods for different objects. For objects with a small height, it can form a closed diamond shape to encircle the objects (encircling method).
For objects with a large height, the gripper’s two fingers can clip on each side of the objects to utilize the friction forces for perching (clipping method). The gripper is integrated onto a palm-size quadcopter to enable a mechatronic system for perching, and demonstrate successful perching with both clipping and encircling methods as well as aerial grasping.
Colorado State University
Although the bistable gripper is used with a palm-size quadcopter, the design strategy can also be applied to large-size MAVs for both energy efficient perching and aerial grasping.
Details for the research can be found in a recent publication in IEEE/ASME Transactions on Mechatronics.
Source: Press Release