

An accurate estimate of heading in a UAS can be critical to completing the mission safely and efficiently. Generally, this information is provided by magnetometers, however, their precision is improved with the presence of Dual GNSS Compass systems capable of calculating heading using GNSS signal interferometry techniques.
The use of both technologies combined allows to configure a redundant, robust and reliable system also under extreme climatic conditions and with excessive crosswinds.
UAV Navigation is aware of the possible risks and challenges that an aircraft faces during its operation, so it works to create a system of the highest quality and reliability. For this reason, our engineers develop algorithms and products that increase the operational safety of the aircraft.
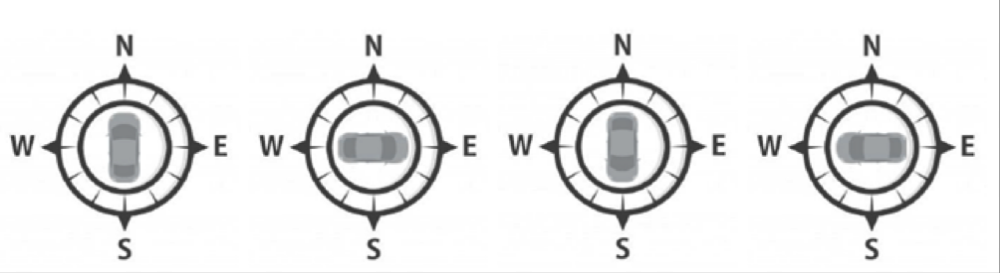
On this occasion, our team carried out demonstrative tests of the Dual GNSS Compass capacity with our POLAR-300 AHRS together with the NEWS magnetic calibration algorithm, capable of calculating calibration parameters for the magnetometer using magnetic measurements obtained by orienting the vehicle towards the four cardinal points (figure 1).
A ground vehicle was used for the tests, which represents a greater challenge for the systems because the presence of metal affects the calibration of the magnetometer. In this way, the existence of an algorithm such as the NEWS developed by UAV Navigation becomes essential to calibrate the magnetometer due to the inability to rotate such a large vehicle in all directions. Similarly, operating a ground vehicle in an urban environment is challenging for the Dual GNSS Compass (DGC) due to possible signal bounce and lower visibility of the sky.
Two different tests were carried out: a dynamic test and a static one.
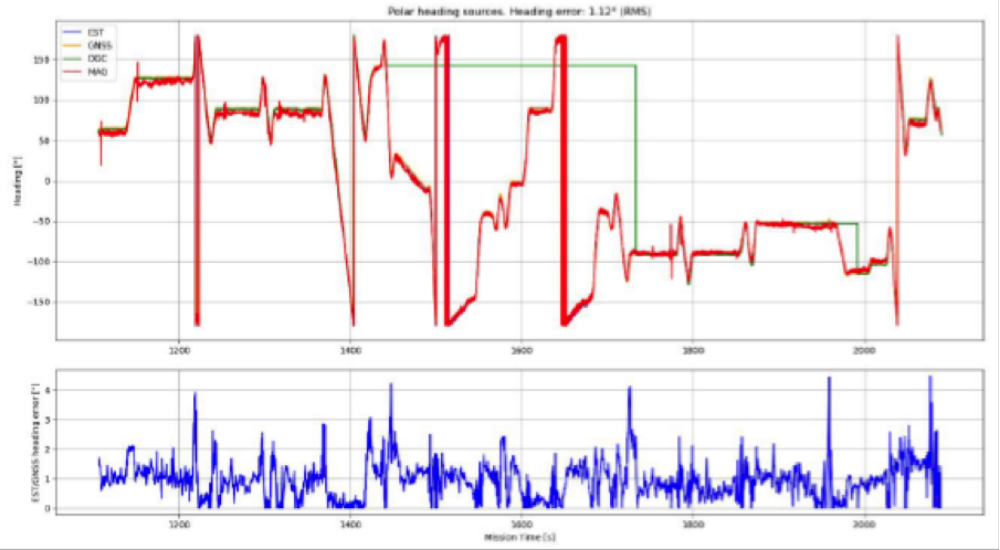
- The dynamic test started with the calibration of the internal magnetometer using the NEWS algorithm. This was followed by a tour (figure 2) to observe the different sources of estimated heading.
- The static test was performed with the vehicle stationary. First, the Dual GNSS Compass was used to estimate the heading and then it was disconnected to observe the heading reported by the magnetometer.

The test results show that both the Dual GNSS Compass and the magnetometer performed correctly during the test. Likewise, the tests carried out verify how the calibration with the NEWS algorithm is capable of providing the required precision in the estimated heading.
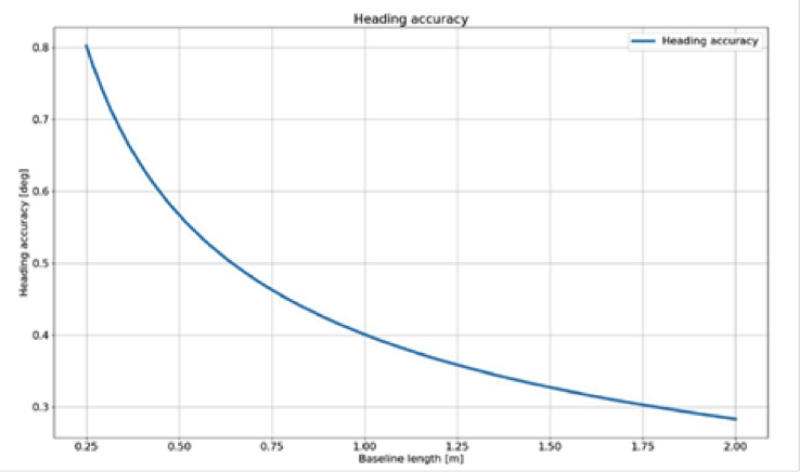
Finally, a precision in the heading calculation of the order of 0.3º RMS (dependent on the distance between both antennas, see figure 5) is confirmed.
With these tests, UAV Navigation has demonstrated the excellent performance of the state estimation of its systems in ferromagnetic environments thanks to its ability to use different data acquisition sources to calculate the heading of the vehicle.
Source: Press Release