
Aerial drones are much more useful if they can grasp and carry objects, plus they use much less power if they can perch on stationary objects instead of hovering. A new attachment allows drones to do both, without using any electricity.
The experimental Mechanically Intelligent and Passive (MIP) gripper was developed at Colorado State University, by a team led by Dr. Jianguo Zhao.
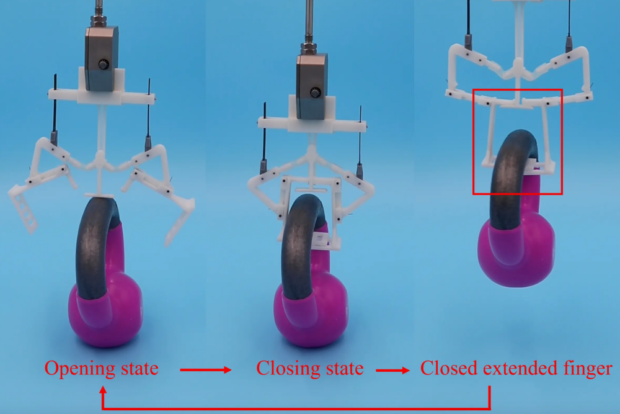
Mounted either on top of or beneath a multi-rotor drone, it incorporates two vertically oriented hinged fingers that bend out to either side, along with a straight-up-and-down impact pad which is situated vertically between them. In its default state, the MIP remains open, with the fingers spread apart.
When the impact pad makes contact with an unyielding object, however, it’s pushed like a plunger, causing the linked fingers to close together. The weight of the drone or its payload subsequently keeps the gripper closed. When that weight is released, the device opens again.
For perching (or hanging, really), the MIP is installed on top of the drone. The aircraft starts by positioning itself below a horizontally oriented object – such as a steel rod or a tree branch –then flys up straight upward, causing the contact pad to press against that object.
This causes the fingers to close around the item (meeting on top of it), allowing the drone to shut off its motors and hang beneath it. As the drone hangs, its weight keeps the gripper closed. Once it’s time to leave, the drone just flies upward slightly, releasing its weight on the MIP so that it opens.
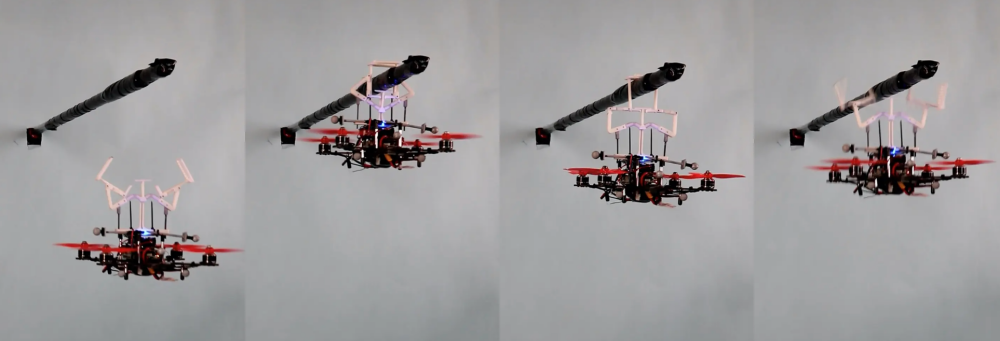
A quadcopter uses the MIP to hang from a horizontal rod
For grasping, the gripper is installed on the underside of the drone, with the opening between the fingers facing downward.
The contact pad then presses onto a target item from above, causing the fingers to close around it. As the drone proceeds to lift the item, the weight of that dangling item keeps the fingers closed. They stay closed until the object is placed on an unyielding surface (such as the ground), releasing its weight on the gripper.
Zhao and colleagues previously developed an earlier version of the technology, which we covered two years ago. The MIP differs from that device in that it requires no power to release its grip, it allows the drone to more easily release itself from a hanging state, and it’s able to support much more weight – whereas the previous model could only support payloads of less than 30 g (1 oz), the MIP can manage over 3.7 kg (8 lb).
A paper on the study – which was conducted by students Billy Hsiao and Jiefeng Sun under Zhao’s supervision – was recently published in the journal IEEE/ASME Transactions on Mechatronics.
Photos: Dr. Jianguo Zhao
Source: New Atlas
Atlas