

Canadian investigators believe the police operator of an unmanned aerial vehicle became task-saturated, and unaware of a collision risk, before the craft was struck by a Cessna 172N flown by a student on a training flight.
In the heat of the chase for an armed suspect, the operator of a Canadian police surveillance drone didn’t tell air traffic control (as required) they were operating near a busy airport in Toronto. The drone collided with a Cessna 172 in August of 2021.
According to a Transportation Safety Board report, the York Regional Police pilot told investigators he thought the area about 1.2 nautical miles roughly off the end of Buttonville Airport’s Runway 15 was free of traffic and he put the 13.5-pound DJI Matrice M210 into a hover at 400 feet AGL. The instructor and student in the 172 were on final when they heard and felt a significant impact and assumed they’d hit a bird. They continued the approach and landed normally and discovered the extensive damage to the cowl on the ramp.
The report says the pilots didn’t see the drone and the drone pilot may have been “task saturated.” It also said the spotter the pilot had asked to monitor the drone visually wasn’t trained and didn’t know he was supposed to be able to see the aircraft at all times.
Since the mishap, the police force has rewritten its drone procedures to ensure all the rules are followed and that all personnel involved in drone operations are properly trained.
AIR TRANSPORTATION SAFETY INVESTIGATION REPORT A21O0069
Summary
On 10 August 2021, the Cessna 172N aircraft (registration C-GKWL, serial number 17268441) operated by Canadian Flyers International Inc. was on a day visual flight rules training flight, on final approach to Runway 15 at Toronto/Buttonville Municipal Airport, Ontario, with a student pilot and flight instructor on board. At approximately 1301 Eastern Daylight Time, the student pilot and flight instructor heard and felt a solid impact at the front of the aircraft. Suspecting a bird strike, they continued the approach and made an uneventful landing, exiting the runway and proceeding to park on the ramp. After parking the aircraft, they observed damage on the front left cowl under the propeller; however, there were no signs that a bird had struck the aircraft.
Shortly afterward, a member of the York Regional Police reported to airport staff that he believed a collision had occurred between the remotely piloted aircraft he had been operating and another aircraft. The remotely piloted aircraft, a DJI Matrice M210 (registration C-2105569275), had been in a stationary hover at 400 feet above ground level when the 2 aircraft collided. The DJI Matrice M210 was destroyed.
There were no injuries to either pilot on the Cessna 172N or to persons on the ground.
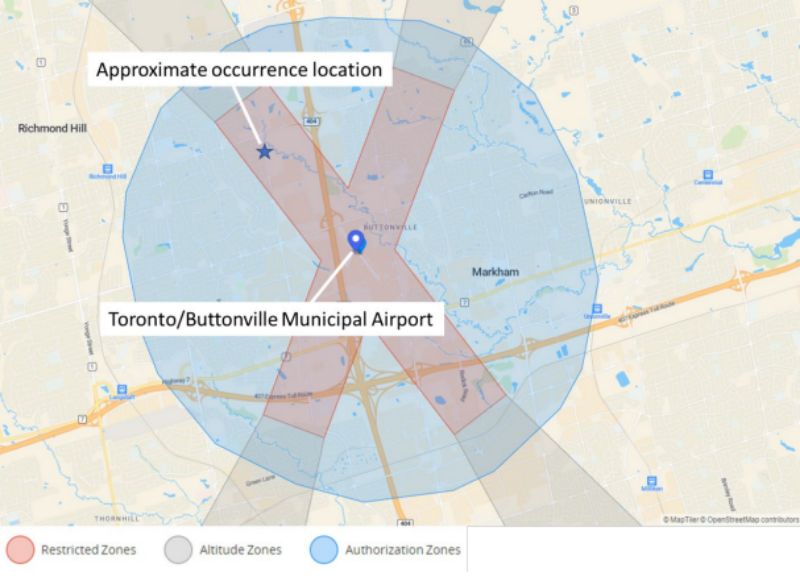
Source: DJI, Fly Safe Geo Zone Map, with TSB annotations
Findings as to causes and contributing factors
These are conditions, acts or safety deficiencies that were found to have caused or contributed to
this occurrence.
1. The flight crew of the Cessna 172N was unaware of the presence of airborne remotely piloted aircraft traffic in the vicinity and, due to several factors, the active scanning that is part of the see-and-avoid principle was unsuccessful in identifying the conflict.
2. York Regional Police policy does not require that visual observers be trained crew members, and the remotely piloted aircraft pilot did not brief the visual observer on his role and responsibilities before the operation. As a result, the visual observer was not aware of the requirement to maintain visual line-of-sight with the remotely piloted aircraft, nor was he trained in visual scanning techniques or aircraft identification.
3. The remotely piloted aircraft pilot was tasked with operating the camera system, monitoring the status of the remotely piloted aircraft, and communicating on multiple channels. As a result, he likely became task saturated, restricting his ability to visually monitor the remotely piloted aircraft and hear radio calls on the control zone’s mandatory frequency and the sound of incoming aircraft, both of which preceded the collision.
4. In the moments leading up to the collision, the pilot of the remotely piloted aircraft likely was task saturated, the visual observer was unaware of the requirement to maintain visual line-of-sight, and the Cessna pilots’ active scan was unsuccessful; consequently, the conflict went unrecognized and the 2 aircraft collided.
Findings as to risk
These are conditions, unsafe acts or safety deficiencies that were found not to be a factor in this occurrence but could have adverse consequences in future occurrences.
1. If pilots do not consult established checklists before and during flight operations, there is a risk that checklist items deemed critical to the safety of the flight will be omitted.
2. If remotely piloted aircraft operators who plan to operate in controlled airspace do not communicate their flight intentions with, and receive authorization from, the air traffic services provider, there is an increased risk of conflict or collision with another aircraft.
The full 29-page report can be accessed here.
Sources: AV Web; The Transportation Safety Board of Canada (TSB)