
Wild land fires pose significant challenges to both ecosystems and human safety, necessitating innovative approaches for effective management and mitigation. Unmanned aerial vehicles have emerged as invaluable tools in addressing various aspects of wildfire and prescribed fire science. Research funded by the European Union’s Horizon Europe research and innovation program offers a comprehensive exploration of the design and modelling of a versatile, reconfigurable multi-rotor UAV.
Abstract:
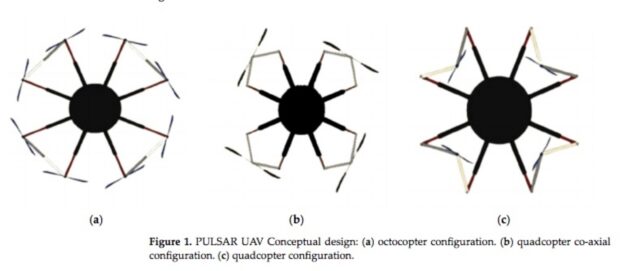
Our study introduces a new approach, leveraging robotics technology and remote sensing for multifaceted applications in forest and wildfire management. Presented in this paper is PULSAR, an innovative UAV with reconfigurable capabilities, able of operating as a quadcopter, a co-axial quadcopter, and a standalone octocopter. Tailored to diverse operational requirements, PULSAR accommodates multiple payloads, showcasing its adaptability and versatility.
This paper meticulously details material selection and design methods, encompassing both initial and detailed design, while the electronics design section seamlessly integrates essential avionic components.

The 3D drone layout design, accomplished using SOLIDWORKS, enhances understanding by showcasing all three different configurations of PULSAR’s structure. Serving a dual purpose, this study highlights UAV applications in forest and wildfire management, particularly in detailed forest mapping, edge computing, and cartographic product generation, as well as detection and tracking of elements, illustrating how a UAV can be a valuable tool.
Following the analysis of applications, this paper presents the selection and integration of payloads onto the UAV. Simultaneously, each of the three distinct UAV configurations is matched with a specific forest application, ensuring optimal performance and efficiency.
Lastly, computational validation of the UAV’s main components’ structural integrity is achieved through finite element analysis (FEA), affirming the absence of issues regarding stress and displacement. In conclusion, this research underscores the efficacy of PULSAR, marking a significant leap forward in applying robotics technology for wildfire science.
The full 37-page paper can be accessed here.
Source: ResearchGate