

Perching with winged Unmanned Aerial Vehicles has often been solved by means of complex control or intricate appendages. Mohammad Askari, Michele Benciolini, Hoang-Vu Phan, William Stewart & Dario Floreano, researchers at the Laboratory of Intelligent Systems, EPFL, Lausanne, Switzerland, present a method that relies on passive wing morphing for crash-landing on trees and other types of vertical poles:
Inspired by the adaptability of animals’ and bats’ limbs in gripping and holding onto trees, we design dual-purpose wings that enable both aerial gliding and perching on poles.
With an upturned nose design, the robot can passively reorient from horizontal flight to vertical upon a head-on crash with a pole, followed by hugging with its wings to perch. We characterize the performance of reorientation and perching in terms of impact speed and angle, pole material, and size.
The robot robustly reorients at impact angles above 15° and speeds of 3 m ⋅ s−1 to 9 m ⋅ s−1, and can hold onto various pole types larger than 28% of its wingspan in diameter.
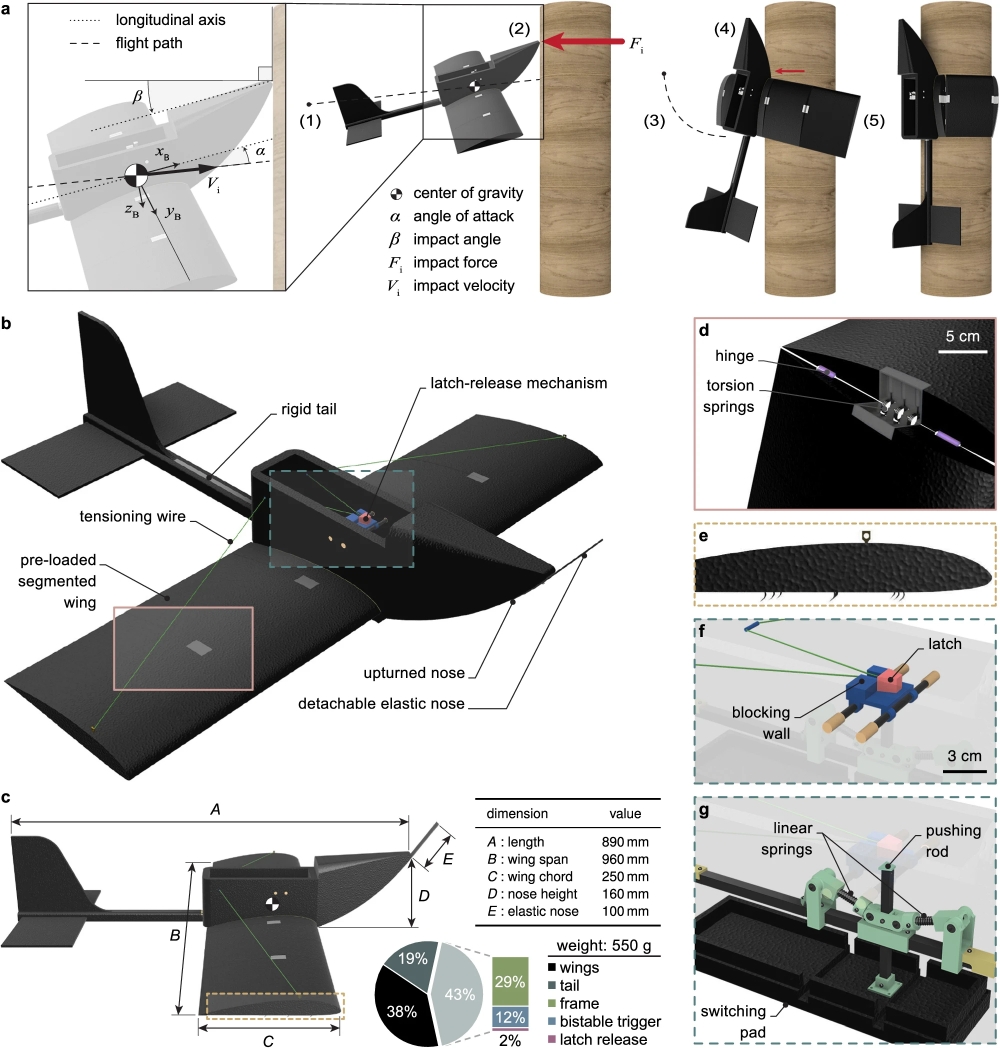
a Operating principle of PercHug depicting the key steps of the perching maneuver: (1) gliding, (2) primary impact, (3) reorientation and wing release, (4) secondary impact, and (5) wing-wrapping. The red arrows represent the expected magnitudes of the impact forces, proportionally drawn. b Isometric view of PercHug showing different elements of the robotic platform. c Side view and physical properties of the robot. d Pre-loaded segmented wing interface in an open configuration. e Side view of the outermost wing segment highlighting the hooks. f Latching wing release mechanism (blue and red). g Backup bistable trigger (green)
We demonstrate crash-perching on tree trunks with an overall success rate of 73%. The method opens up new possibilities for the use of aerial robots in applications such as inspection, maintenance, and biodiversity conservation.
Operating principle and robot design
The complete perching maneuver occurs in a fraction of a second, within approximately 200 ms (see Fig. 2a). It begins with the UAV flying directly toward a pole at a certain speed and angle of attack to make a primary impact with the nose. The impact energy causes the robot to start rotating in the pitch direction and release its pre-loaded wings.
The maneuver concludes with a secondary impact on the fuselage or tail to halt the rotation and the wings hugging the pole to hold the UAV in place. Only the correct sequence of events can lead to a successful landing on the pole.
The full paper can be accessed here.
Top Photos: A straw-coloured fruit bat (Eidolon helvum) holding onto a tree branch using its wings and clawed feet (left), a great grey owl (strix nebulosa) fledging on its first day out of the nest wrapping its wings around a tree trunk to rest during climbing (center), and the PercHug robot perching vertically on a tree by hugging (right).
Source: Press Release