
A study published in Engineering introduces a novel image-based visual servoing (IBVS) method for unmanned aerial vehicles (UAVs) to track dynamic targets in GPS-denied environments.
Titled “Dynamic Target Tracking of Unmanned Aerial Vehicles Under Unpredictable Disturbances,” the research article presents a comprehensive approach that addresses the challenges of estimating target velocities, image depth estimation, and tracking stability in the presence of external disturbances.
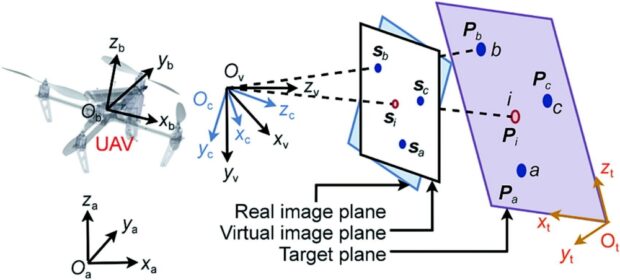
The proposed method utilizes a constructed virtual camera to derive simplified and decoupled image dynamics for underactuated UAVs. By considering the uncertainties caused by unpredictable rotations and velocities of dynamic targets, the researchers have developed a unique image depth model that extends the IBVS method to track rotating targets with arbitrary orientations. This model ensures accurate image feature tracking and smooth trajectory of the rotating target.
To estimate the relative velocities between the UAV and the dynamic target, a velocity observer has been designed. This observer eliminates the need for translational velocity measurements and mitigates control chatter caused by noise-containing measurements. Additionally, an integral-based filter has been introduced to compensate for unpredictable environmental disturbances, thereby enhancing the anti-disturbance ability of the UAV.
The stability of the velocity observer and IBVS controller has been rigorously analyzed using the Lyapunov method. Comparative simulations and multistage experiments have been conducted to illustrate the tracking stability, anti-disturbance ability, and tracking robustness of the proposed method with a dynamic rotating target.
Key contributions of this study include:
- Novel image depth model: The researchers have proposed a unique image depth model that accurately estimates image depth without requiring rotation information of the tracked target. This model enables the application of the proposed IBVS controller to track dynamic rotating targets with arbitrary orientations.
- Velocity observer: A dedicated velocity observer has been designed for the estimation of relative velocities between the UAV and the dynamic target. This allows the proposed method to be utilized in GPS-denied environments, while mitigating control chatter caused by noise-containing velocity measurements.
- Integral-based filter: An integral-based filter has been developed to estimate and compensate for unpredictable disturbances, including the acceleration of the dynamic target and environmental disturbances. This enhances the UAV’s ability to handle unknown movements of the dynamic target and external disturbances.
In conclusion, this study presents a dynamic IBVS method that significantly improves the tracking performance of UAVs in the presence of unpredictable disturbances. By utilizing a velocity observer, a novel image depth model, and an integral-based filter, the proposed method demonstrates enhanced tracking stability, anti-disturbance ability, and robustness.
The stability of the method has been thoroughly analyzed using Lyapunov theory, and simulations and experiments have been conducted to verify its effectiveness.
The full study can be accessed here.
Source: TechXplore